:quality(75)/quy_hoach_dong_0_e3b0a07758.jpg)
Quy hoạch động là gì? Nguyên lý hoạt động và ứng dụng thuật toán Dynamic Programming chi tiết
Trong thế giới lập trình và khoa học máy tính, có một phương pháp gần như “thần thánh” giúp giải quyết vô số bài toán khó, đó chính là quy hoạch động. Nếu bạn từng tham gia các kỳ thi lập trình, bạn sẽ nhanh chóng nhận ra rằng gần một nửa số đề thi đều có sự xuất hiện của kỹ thuật này. Không chỉ dừng lại ở các cuộc thi, quy hoạch động còn là một công cụ thiết yếu trong thực tế, đặc biệt khi cần giải quyết những bài toán tối ưu hóa phức tạp. Vậy quy hoạch động là gì, nguyên lý hoạt động ra sao và ứng dụng thế nào trong đời sống cũng như trong lập trình? Hãy cùng FPT Shop tìm hiểu chi tiết trong bài viết này.
Khái niệm và nguyên lý hoạt động của quy hoạch động
Quy hoạch động (Dynamic Programming - DP) là một phương pháp giải thuật quan trọng trong lập trình và khoa học máy tính. Kỹ thuật này cho phép chia nhỏ các bài toán phức tạp thành những bài toán con đơn giản hơn, rồi kết hợp kết quả để tìm ra lời giải tối ưu. Điểm nổi bật của quy hoạch động nằm ở khả năng lưu trữ kết quả trung gian, từ đó tiết kiệm thời gian xử lý và tránh lãng phí tài nguyên do tính toán lặp lại.
Ngày nay, quy hoạch động được ứng dụng rộng rãi trong nhiều lĩnh vực. Từ tối ưu hóa, tìm đường đi ngắn nhất trên bản đồ, đến trí tuệ nhân tạo, xử lý ngôn ngữ tự nhiên, hay thậm chí trong các kỳ thi lập trình - tất cả đều có sự góp mặt của kỹ thuật này. Chính nhờ tính linh hoạt và hiệu quả, DP đã trở thành công cụ không thể thiếu với lập trình viên và nhà nghiên cứu.
Một trong những ưu điểm nổi bật của quy hoạch động là khả năng tiết kiệm đáng kể thời gian xử lý. Thay vì phải tính toán lặp đi lặp lại, các kết quả trung gian được lưu lại và tái sử dụng, nhờ đó tốc độ thực thi được nâng cao rõ rệt. Bên cạnh đó, kết quả mà quy hoạch động mang lại thường có độ chính xác tối ưu, bởi nó dựa trên nền tảng toán học vững chắc, đảm bảo tìm ra lời giải tốt nhất thay vì chỉ dừng lại ở phương án gần đúng.
Tuy nhiên, quy hoạch động cũng có những hạn chế cần được cân nhắc. Việc lưu trữ toàn bộ kết quả trung gian khiến phương pháp này tiêu tốn nhiều bộ nhớ, đặc biệt với các bài toán có không gian trạng thái lớn. Đồng thời, quá trình triển khai quy hoạch động không hề đơn giản, đòi hỏi người lập trình phải có tư duy logic chặt chẽ và hiểu rõ cấu trúc bài toán để thiết kế công thức hồi quy hợp lý.
Phương pháp quy hoạch động trong lập trình
Sự lặp lại trong các bài toán con
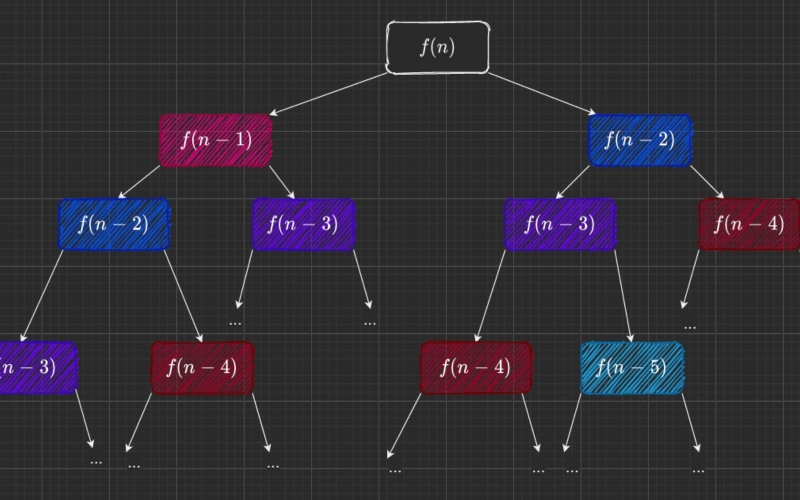
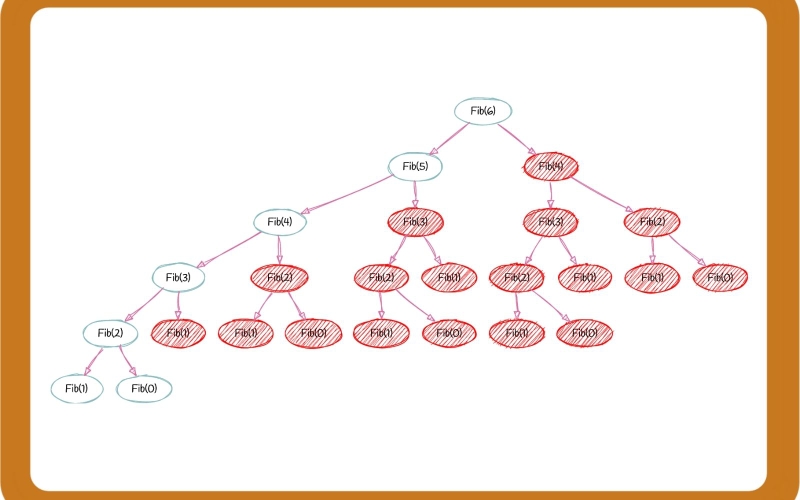
Trong nhiều bài toán có bản chất đệ quy, sẽ xuất hiện hiện tượng các phép tính lặp lại nhiều lần, còn gọi là “bài toán con gối nhau”. Một ví dụ điển hình là dãy Fibonacci. Khi tính toán bằng đệ quy thuần túy, chương trình phải xử lý cùng một giá trị nhiều lần, dẫn đến sự lãng phí lớn về thời gian. Chẳng hạn, khi gọi fibo(5), ta buộc phải tính lại các giá trị như fibo(3) hay fibo(2) nhiều lần, mặc dù chúng đã từng được xử lý trước đó. Đây chính là điểm yếu khiến đệ quy đơn thuần kém hiệu quả trong các bài toán lớn.
Để khắc phục vấn đề này, quy hoạch động ra đời nhằm tối ưu hóa quá trình tính toán. Thay vì lặp lại phép tính, thuật toán sẽ lưu kết quả của từng bài toán con vào bộ nhớ và sử dụng lại khi cần. Cách tiếp cận này biến những phép toán lặp lại trở nên hữu ích, góp phần nâng cao hiệu suất rõ rệt.
Cách tối ưu thông qua cấu trúc con
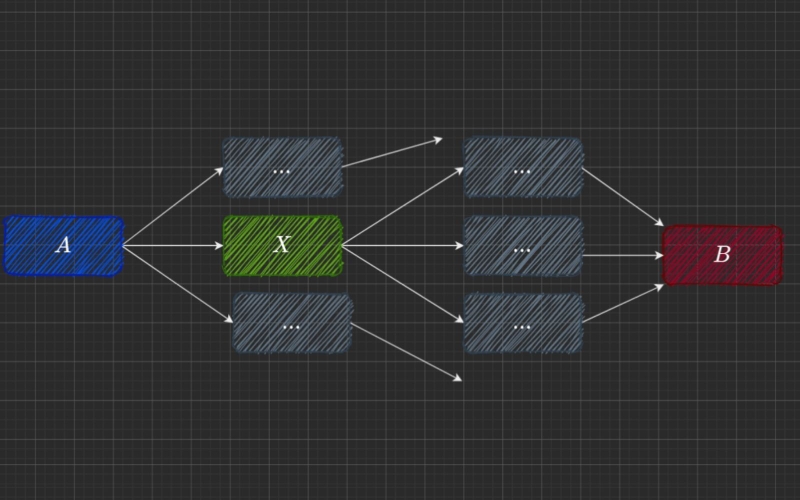
Ngoài hiện tượng gối nhau, một yếu tố quan trọng khác của quy hoạch động là “cấu trúc con tối ưu”. Nguyên tắc này có nghĩa là lời giải tối ưu của bài toán lớn có thể được xây dựng từ lời giải tối ưu của các bài toán nhỏ hơn. Nói cách khác, ta không cần giải quyết toàn bộ một cách phức tạp, mà có thể dựa vào kết quả của những phần đã được rút gọn.
Ví dụ trong bài toán tìm đường ngắn nhất trên đồ thị, giả sử có một đỉnh trung gian x nằm trên đường đi ngắn nhất giữa hai đỉnh u và v. Khi đó, độ dài đường đi ngắn nhất từ u đến v sẽ được xác định bằng tổng của đường đi ngắn nhất từ u đến x và đường đi ngắn nhất từ x đến v. Nguyên lý này là cơ sở quan trọng trong việc xây dựng các công thức hồi quy trong quy hoạch động, đồng thời cũng là nền tảng của nhiều thuật toán nổi tiếng, điển hình như thuật toán Dijkstra.
Cơ chế vận hành của quy hoạch động
Quy hoạch động được nhà toán học Richard Bellman giới thiệu năm 1953 và nhanh chóng trở thành công cụ quan trọng trong tối ưu hóa. Điểm khác biệt so với đệ quy truyền thống là thay vì tính lại kết quả nhiều lần, phương pháp này lưu trữ lời giải của từng bài toán con vào một bảng hoặc mảng. Khi cần, chương trình chỉ việc lấy lại dữ liệu đã có và kết hợp bằng công thức truy hồi.
Trong dãy Fibonacci, thay vì gọi hàm đệ quy liên tục, ta dùng một mảng f[i] để ghi nhớ từng giá trị. Nhờ đó, mỗi số Fibonacci chỉ được tính duy nhất một lần, giúp thuật toán giảm đáng kể thời gian xử lý. Cách tiếp cận này không chỉ tăng tốc độ mà còn mang lại sự ổn định cho các chương trình lớn, vốn đòi hỏi hiệu năng cao.
Các bước cơ bản khi áp dụng
Một bài toán quy hoạch động thường trải qua ba bước chính. Trước tiên, ta cần xác định và giải quyết các trường hợp cơ sở, thường là những bài toán nhỏ nhất. Tiếp đó, sử dụng công thức truy hồi để tính dần kết quả cho các bài toán lớn hơn và lưu lại vào bảng phương án. Cuối cùng, từ bảng đã xây dựng, ta thực hiện truy vết để tìm ra nghiệm tối ưu cuối cùng cho toàn bộ bài toán.
Đi kèm với đó là một số khái niệm quan trọng cần ghi nhớ. “Công thức truy hồi” chính là cầu nối giữa các bài toán con và bài toán lớn. “Cơ sở quy hoạch động” chỉ những trường hợp ban đầu đã có sẵn lời giải. Còn “Bảng phương án” là nơi lưu giữ toàn bộ kết quả trung gian, giúp việc tính toán trở nên nhanh chóng và chính xác hơn. Khi nắm vững những yếu tố này, người học có thể dễ dàng triển khai quy hoạch động cho nhiều dạng bài toán khác nhau.
Các dạng toán quy hoạch động
Quy hoạch động thường được chia thành hai nhóm chính: Bài toán tối ưu và bài toán tổ hợp. Mỗi nhóm có đặc trưng riêng về công thức và cách xây dựng lời giải.
Bài toán tối ưu
Đây là loại bài toán cần tìm kết quả tốt nhất theo một tiêu chí nào đó, chẳng hạn nhỏ nhất, lớn nhất hoặc ngắn nhất. Ví dụ quen thuộc là tìm số bước ít nhất để leo một cầu thang có n bậc, khi mỗi lần có thể bước 1 hoặc 2 bậc. Để lên bậc n, ta chỉ cần chọn tối ưu giữa việc đi từ bậc n-1 hoặc từ n-2. Công thức tổng quát dạng này thường là:
dp[s] = min(F1(...), F2(...), ...)
Trước khi tính toán, mảng dp thường được khởi tạo bằng giá trị “rất lớn” để loại bỏ các nghiệm không khả thi. Nhờ đó, mỗi kết quả mới luôn nhỏ hơn và đảm bảo tính tối ưu.

Bài toán tổ hợp
Khác với tối ưu, dạng này yêu cầu đếm số cách để thực hiện một nhiệm vụ. Ví dụ, với một đoạn tường dài n, số cách ghép gạch dài 1 và 2 có thể tính bằng tổng số cách khi đặt gạch 1 và khi đặt gạch 2. Công thức tổng quát thường có dạng:
R[s] = F1(...) + F2(...) + ....
Trong bài toán tổ hợp, giá trị khởi tạo thường là 0, vì ta chỉ cộng dồn số cách. Điểm quan trọng nhất là mỗi cách chỉ được tính đúng một lần, nếu đếm trùng, đáp án sẽ sai. Một biến thể khó hơn là khi các hoán vị không được coi là khác nhau, lúc này ta cần xây dựng bài toán con theo hướng loại hoặc chọn một phần tử nhất định để tránh lặp.

Tạm kết
Qua bài viết này, FPT Shop đã cùng bạn tìm hiểu về quy hoạch động, từ khái niệm cơ bản, nguyên lý hoạt động cho đến những ví dụ minh họa cụ thể và phân loại bài toán thường gặp. Có thể thấy, quy hoạch động không chỉ là một kỹ thuật lập trình mạnh mẽ mà còn là công cụ quan trọng giúp giải quyết hiệu quả nhiều bài toán phức tạp trong thực tế. Việc nắm vững kiến thức về quy hoạch động sẽ giúp bạn rèn luyện tư duy logic, tối ưu hóa cách tiếp cận vấn đề và tự tin hơn trong các kỳ thi lập trình cũng như trong công việc sau này.
Để hỗ trợ bạn tốt nhất trong việc lập trình, hãy sở hữu ngay một chiếc laptop MSI tại FPT Shop. Với cấu hình mạnh mẽ, khả năng xử lý đa nhiệm mượt mà và độ bền cao, laptop MSI sẽ là người bạn đồng hành đáng tin cậy trong mọi dự án. Xem ngay tại đây!
Xem thêm:
:quality(75)/small/dao_dong_tu_do_la_gi_cc0721bae7.jpg)
:quality(75)/cypress_la_gi_5_eecee423b8.jpg)
:quality(75)/quy_hoach_phan_khu_la_gi_cover_37d63affb4.png)
:quality(75)/Tong_dat_la_gi_4_c75ea35491.png)
:quality(75)/ngay_trai_dat_thumb_a0a42c4209.jpg)
:quality(75)/gio_trai_dat_la_gi_3_12ac60b251.jpeg)